

HW와 SW에 대한 개방형 정책 앞세워 주요 휴머노이드 연구에서 공용 플랫폼으로 선정
하드웨어와 소프트웨어가 일체화된 오픈 플랫폼의 가능성에 주목한 로보티즈는 버지니아텍, 펜실베니아대학교 등과 협력하여 휴머노이드인 ‘다윈-오피(DARwin-OP)’를 개발했다. 다윈-오피는 하드웨어의 모듈화와 소프트웨어의 추상화로 로봇 하드웨어 개발 없이 휴머노이드 연구에 집중할 수 있는 오픈 플랫폼으로, 주요 휴머노이드 연구 프로젝트에서 공용 플랫폼으로 선정됐으며, 이러한 성과는 공개SW 중심의 개방형 정책을 통해 로봇 산업이 가야 할 방향을 제시한 것으로 평가된다.
|
로보티즈는 기술 집약형 융합 산업이자 신성장동력 중 하나인 로봇과 관련된 다양한 포트폴리오를 보유하고 있다. 이 기업은 구동 및 결합 장치와 관련된 로봇 R&D 사업을 수행한 성과를 바탕으로 모터, 감속기어, 제어기, 통신 등을 하나의 모듈에 통합한 액추에이터인 ‘다이나믹셀’을 자체 개발하고 로봇 대중화를 앞당길 UCR(User Created Robot) 기술을 개발해왔다.
그 과정에서 로보티즈는 광범위한 로봇 분야 중 가장 기술 집약적이면서 선진국과의 기술 격차가 적은 휴머노이드에 주목하고, 솔루션 중심에서 하드웨어의 모듈화 및 표준화가 시도된 다이나믹셀과 소프트웨어가 일체화된 플랫폼의 사업화를 모색했다. 그 결과 미국의 버지니아텍, 펜실베니아, 퍼듀 대학 등으로 구성된 컨소시엄과 협력 체계를 구축한 로보티즈는 2004년 개발된 다윈 시리즈를 기반으로 인간, 인공지능, 보행 등의 알고리즘 개발과 역 운동학, 언어학 등의 연구를 위한 휴머노이드 오픈 플랫폼인 다윈-오피를 개발했다.

[소형 휴머노이드 로봇, 다윈-오피]
개방형 오픈 플랫폼을 개발한 배경에 대해 김병수 로보티즈 대표는 “컨소시엄이 내놓은 소형 휴머노이드 테스트베드의 연구 성과를 수용하고 그들이 요구한 연구 중심의 플랫폼을 제공하기 위해 다윈을 오픈 플랫폼으로 새로이 개발해야 했다”고 설명하고 “연구에 더 집중할 수 있도록 소프트웨어를 추상화하고 코드 규모도 최소화할 필요가 있었다”고 덧붙였다.
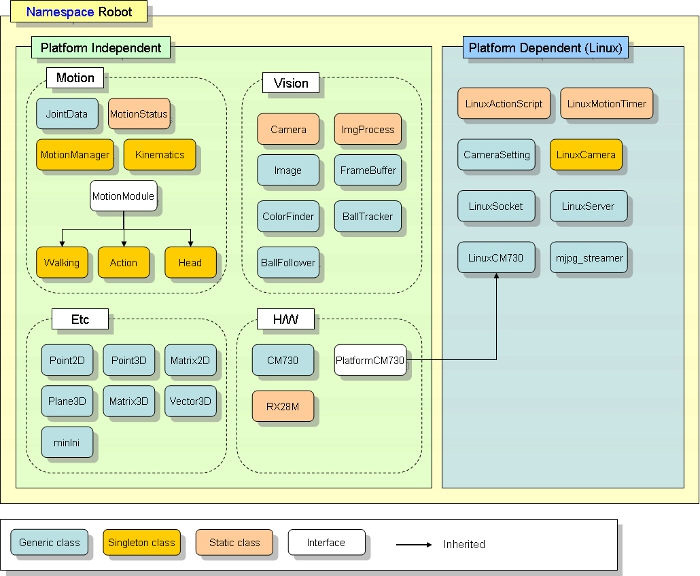
[공개SW인 다윈-오피의 다이어그램]
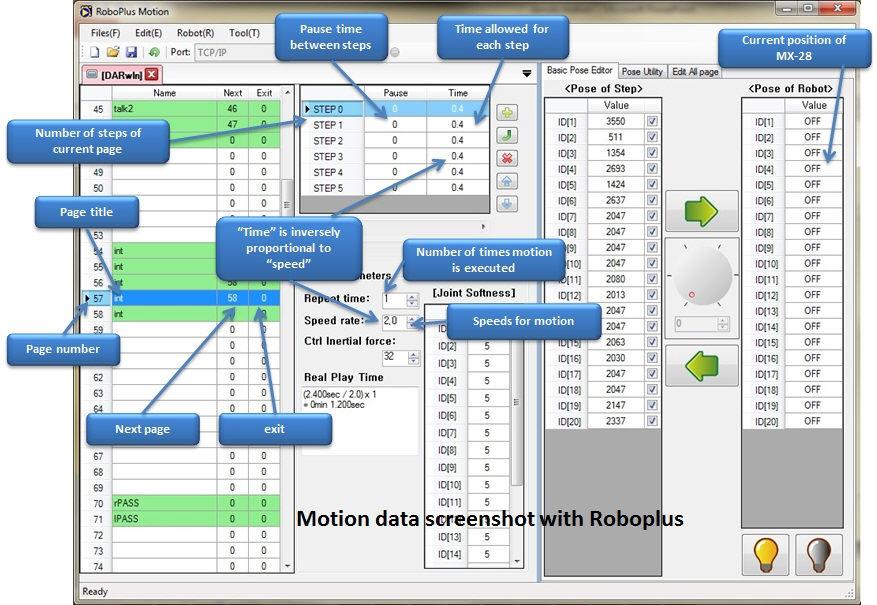
[다윈-오피 프로그래밍 툴인 로보플러스]
개방 중심의 오픈 플랫폼으로 재개발
이에 따라 로보티즈는 액추에이터를 내구성과 정밀성이 향상된 다이나믹셀 MX-28T로 업그레이드하고 그 수도 20개로 늘려 인간과 유사한 자연스러운 동작이 가능하도록 로봇 구조를 재설계했다. 상용화된 로봇 플랫폼으로는 최초로 휴머노이드 로봇에 인텔 아톰 Z530 기반의 PC를 탑재하고, 이를 각각의 다이나믹셀과 센서 등의 IC를 제어하는 CM730 임베디드 보드와 연동해 안전성을 높였다. 또한 공개SW인 우분투 데스크톱 9.10 OS와 독립된 다윈-오피 프레임워크는 헤드, 액션, 워킹, 이미지 프로세싱 등의 소프트웨어 각 기능을 클래스로 모듈화하고 하드웨어 제어를 위한 전문 지식 없이도 API 형태의 프로토콜을 통해 C++, C#, 파이썬, 자바 등의 언어와 비주얼 스튜디오, 랩뷰, 매트랩, 이클립스 등의 IDE(Integrated Development Environment)로 손쉽게 개발할 수 있도록 하드웨어를 모듈화하고 소프트웨어를 추상화했다. 이런 기술적 노력과 함께 크기, 운동학, 역할, CAD 도면 등의 하드웨어 정보를 비롯해 IC, 개발 환경, 프레임워크, 소스 코드, 관리 정보, 사용자 코드, 다양한 응용 사례 등 다윈-오피 오픈 플랫폼과 연구 성과 일체를 공개한 로보티즈는 robotsource.org 포럼을 통해 관련 연구도 지원하고 있다.
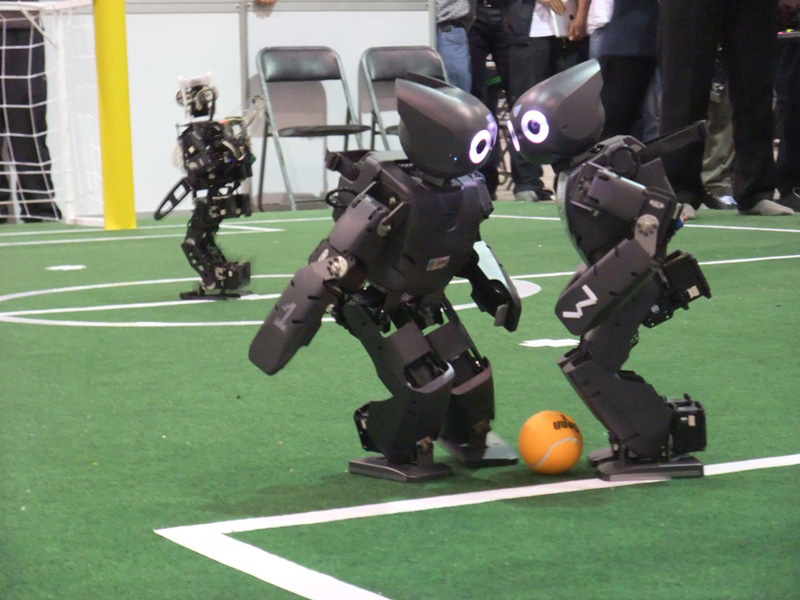
[로봇 월드컵의 아동형 리그에서 2연패 달성한 다윈-오피]
[20개의 다이나믹셀로 인간와 유사한 동작이 가능하다]
휴머노이드 연구 위한 공용 플랫폼으로 선정
이런 노력의 결과 미국 과학연구재단(NSF, National Science Foundation)은 소형 휴머노이드 연구 과제를 위한 공용 플랫폼으로 다윈-오피를 선정했고, 로봇자동화국제회의(ICRA, International Conference on Robotics and Automation)에서는 다윈-오피 콘테스트가 신설되기도 했다. 이뿐만 아니라 인간 뇌의 생물학적 메커니즘을 공학적으로 설계하는 카이스트 전기 및 전자공학과의 Neuro-robotics 연구에 다윈-오피가 중요 매개체로 활용되고 있다. 게다가 세계로봇축구연맹(FIRA) 로봇 월드컵의 아동형 리그에 참가한 전체 팀 중 80%가 다이나믹셀을, 30%가 다윈-오피 공개SW를 채택하는 등 공개SW 중심의 개방 전략이 점차 가시적인 성과를 나타내기 시작했다. 이로 인해 휴머노이드 시장을 선점하고 있었던 프랑스 로봇 업체인 알데바란의 폐쇄적인 소프트웨어 정책이 최근 공개SW로 전향되는 등 로봇 산업에 긍정적인 변화를 이끈 것으로 평가된다.
이에 대해 김병수 대표는 “국내외 주요 연구에 공용 플랫폼으로 활용된 사례처럼 향후 다윈-오피 플랫폼 생태계가 확고히 구축되면 휴머노이드 기술 표준화에서 국내 로봇 기술이 유리한 위치에 오를 수 있을 것”이라고 기대했다. 이어서 그는 산학협력으로 기업과 산업이 함께 성장할 수 있는 선순환 생태계를 구축한 이번 사례를 통해 광범위한 로봇 분야에서 국내 로봇 산업이 나아갈 방향을 찾았다는 점에도 큰 의미를 부여했다.
[2012 로봇그랜드챌린지에서 대통령상을 수상한 다윈-오피]
“오픈 플랫폼 전략 강화해 휴머노이드 시장 주도”
최근 버지니아 공대와 펜실베니아대학교, 미국 방위산업체 해리스와 함께 팀을 이룬 로보티즈는 미국방부고등기술연구원(DARAPA)의 ‘로봇공학 챌린지’에서 본선 진출 7개 팀에 선정돼 사람 크기의 휴머노이드인 ‘THOR(Tactical Harzadous Operations Robot)’을 개발하고 있다. 공개SW인 다윈-오피와 중대형 액추에이터인 다이나믹셀 프로가 채택된 THOR의 각 모듈에서 로보티즈는 손과 팔의 개발을 담당하고 있다.
이처럼 개방형 공용 플랫폼으로 성공적인 산학협력 모델을 지속적으로 이어가고 있는 로보티즈는 ‘2012 로봇그랜드챌린지’에서 다윈-오피가 ‘로봇기술대상 대통령상’을 수상하는 영예를 안았을 뿐 아니라, 다이나믹셀이 전 세계 40여 개국에 수출되는 데 힘입어 ‘2012 세계일류상품’으로 선정되는 기쁨을 누렸다. 이런 대내외적인 성과에 머무르지 않고 로보티즈는 휴머노이드의 각 기능을 더 세밀하게 모듈화하고 확고한 공개SW 중심의 생태계를 구축하는 데 집중해 다윈-오피를 휴머노이드 연구를 위한 공용 플랫폼으로 더 확산시킬 계획이다.
-----------------------------------------------------------------------------------------------------------------------------
[인터뷰]
“공개SW의 기술적 내재화에 힘써야”
로보티즈 김병수 대표
 Q> 오픈 플랫폼이 왜 중요한가
Q> 오픈 플랫폼이 왜 중요한가오픈 플랫폼 전략은 로봇 산업을 발전시킬 중요한 움직임일 뿐 아니라 기업에게도 이익이 되는 유용한 전략이다. 오픈 플랫폼을 지향한 다윈-오피가 주요 휴머노이드 프로젝트에 공용 플랫폼으로 선정된 것은 플랫폼 개발사와 파트너사가 함께 성과를 공개함으로써 플랫폼이 발전하고 응용 가능한 소스가 공유되면서 생태계 구축이 가능했기 때문이다. 간혹 제품화된 로봇이 산업이 원하는 방향과 일치하지 않을 때가 있는데 이 같은 시행착오를 막는 가장 효과적인 수단 중 하나가 오픈 플랫폼이다. 이런 전략 차원에서 국내 로봇 산업에서 오픈 플랫폼을 선제적으로 도입할 필요가 있다.
Q> 기능의 추상화로 얻을 수 있는 이점은
기술 집약적이며 산업과 산업의 융합체인 로봇 산업은 하드웨어 계층의 소프트웨어 개발부터 애플리케이션, 알고리즘까지 다방면의 기술 전문성이 요구돼 지금까지 소수의 전문 인력만이 로봇을 개발할 수 있었다. 또한 로봇 제품화 과정의 70%는 매 프로젝트마다 비슷한 개발 작업의 반복인 경우가 많다. 이런 문제에 대한 근본적인 원인은 추상화에서 찾을 수 있다. PC 이용자가 세부적인 IC 정보나 관련 전문 지식 없이도 PC를 사용하고 프린터로 문서를 출력할 수 있듯 로봇 기능을 추상화함으로써 하드웨어에 대한 구조적인 이해 없이도 로봇을 개발할 수 있는 것이다. 이를 통해 코드 재사용을 확대하고 자연스레 더 생산성 높은 분야에 역량을 집중할 수 있다.
-----------------------------------------------------------------------------------------------------------------------------
- 마이크로소프트웨어 조수현 기자 suhyeoni@imaso.co.kr
- 공개SW 역량프라자

| 번호 | 제목 | 조회수 | 작성 |
|---|---|---|---|
| 114 | [공개SW 활용 성공사례 72] KT 클라우드웨어 - 한국형 빅데이터 Hybrid DW 분석 시스템 구축 | 1585 | 2013-02-19 |
| 113 | [공개SW 활용 성공사례 71] 엘브이스터디 - 공개SW 기반 웹사이트로 차별화된 학습 서비스 제공 | 1274 | 2013-02-13 |
| 112 | [공개SW 활용 성공사례 70] 팬택 - 공개SW 도입에 따른 기술 내재화로 제품 경쟁력 강화 | 1245 | 2013-02-05 |
| 111 | [공개SW 활용 성공사례 69] 에카픽 - Cocos2d 개발엔진 도입으로 게임 몰입도 상승 | 1569 | 2013-01-29 |
| 110 | [공개SW 활용 성공사례 68] 국가교통정보센터 - 시스템 성능 개선을 통해 원활한 지도기반 모바일 교통정보 제공 | 1502 | 2013-01-22 |
| 109 | [공개SW 활용 성공사례 67] 엔씨소프트 - 게임 로그 데이터 분석 위한 공개SW 기반 GFIS로 게임 내 부정행위 탐지 | 3298 | 2013-01-15 |
| 108 | [공개SW 활용 성공사례 66] 매직에코 - 오픈소스 HW와 SW로 Thing의 기술 장벽 해결 | 1800 | 2013-01-09 |
| 107 | [공개SW 활용 성공사례 65] 로보티즈 - 주요 휴머노이드 연구에서 공용 플랫폼으로 선정 | 1621 | 2013-01-02 |
| 106 | [공개SW 활용 성공사례 64] 정보통신산업진흥원 - 공개SW 기반 전자문서 유통서비스 구축 | 1384 | 2012-12-21 |
| 105 | [공개SW 활용 성공사례 63] 기상청 - 오픈 소스 GIS 소프트웨어를 활용한 지도 기반 날씨 정보 제공 | 1654 | 2012-12-18 |
0개 댓글